由于工藝要求不斷提升,設(shè)備上搭載的傳統(tǒng)2D視覺檢測系統(tǒng)難以滿足一些特定檢測需求,例如光伏產(chǎn)業(yè)鏈上游的硅棒直徑檢測,中游的硅片位置度(搭邊)檢測、分選機(jī)應(yīng)用等。那么如何利用海康機(jī)器人3D激光輪廓傳感器實(shí)現(xiàn)硅片位置度(搭邊)檢測?
半導(dǎo)體硅片生產(chǎn)工藝

什么是“搭邊”
硅片在PECVD和PVD工藝段中,需要放置到載具中進(jìn)行上下料,載具尺寸與硅片尺寸需剛好適配,若硅片位置發(fā)生偏移,則會出現(xiàn)邊角部位遮蓋在載具邊緣的情況,即為“搭邊”,如果發(fā)生“搭邊”情況,在后續(xù)鍍膜時會導(dǎo)致硅片繞鍍或破裂。為規(guī)避該風(fēng)險,在PECVD和PVD鍍膜上下料時需要對“搭邊”硅片進(jìn)行檢出。
項(xiàng)目需求
視覺系統(tǒng)精度要求 0.1mm
流水線速度要求 200mm/s
■ 項(xiàng)目難點(diǎn)
- 硅片高反光材質(zhì)和載具漫反射材質(zhì)共存,相機(jī)動態(tài)范圍要求高
- 載具多次過爐后會出現(xiàn)顏色變化,視覺需兼容被測物顏色變化
- 載具尺寸大且存在變形,硅片與載具成像對比度不明顯
- 載具移動速度快,相機(jī)幀率要求高
■ 硬件選型

■ 單相機(jī)視場范圍示意
硬件架設(shè)方案
■ 方案一
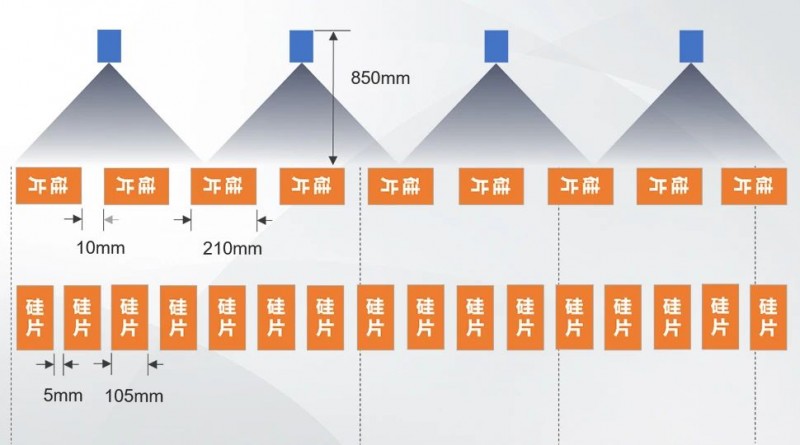
來料方式:210mm*105mm硅片,橫向排列9個,豎向排列16個
架設(shè)方案:4臺相機(jī)水平視野覆蓋整個載具
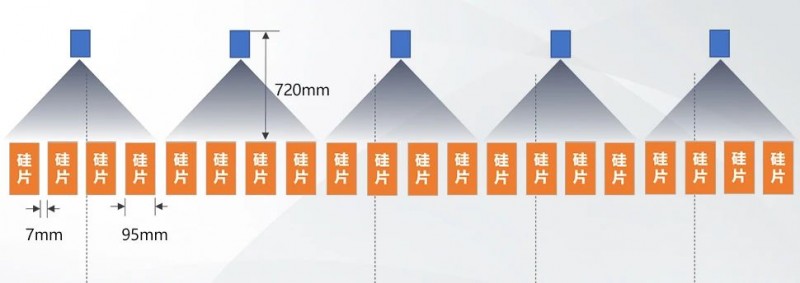
■ 方案二
來料方式:190mm*95mm硅片,豎向排列20個
架設(shè)方案:5臺相機(jī)水平視野覆蓋整個載具
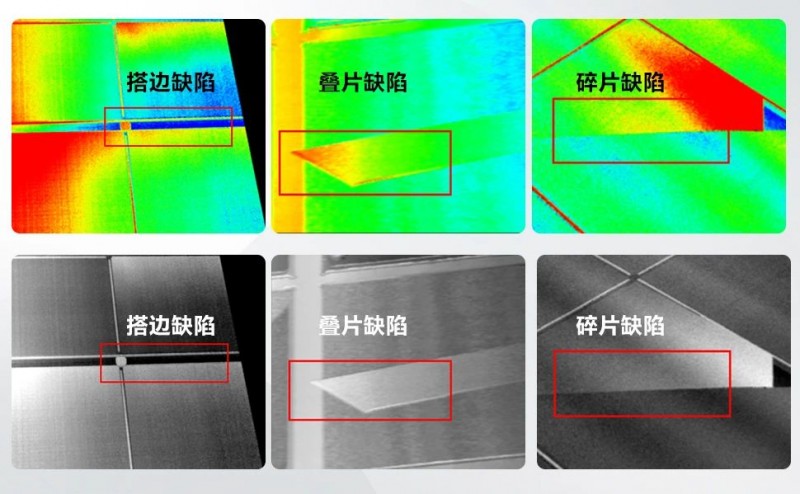
硬件成像展示
VM 3D軟件方案
針對搭邊缺陷檢測,基于相機(jī)采集的深度圖像,導(dǎo)入VM 3D軟件中,依據(jù)mark點(diǎn)定位到每個料盤的四個角點(diǎn),分別在角點(diǎn)料坑上下曲小區(qū)域計算均值,可取四對或八對區(qū)域,比對料坑上下高度差值,正值為OK(綠色非搭邊框),負(fù)值為NG(紅色搭邊框)。
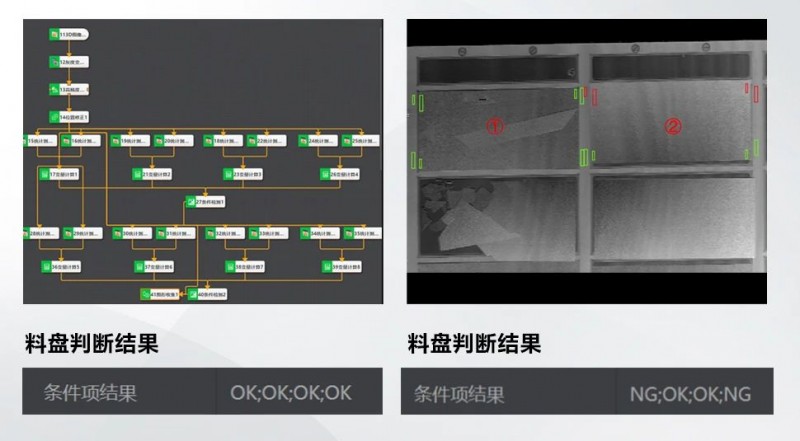
針對疊片和碎片缺陷檢測,VM 3D軟件中,深度圖像分別定位到每個硅片位置,統(tǒng)計每個硅片位置ROI內(nèi)平面度,根據(jù)平面度情況判斷硅片是否存在破碎和疊片。






