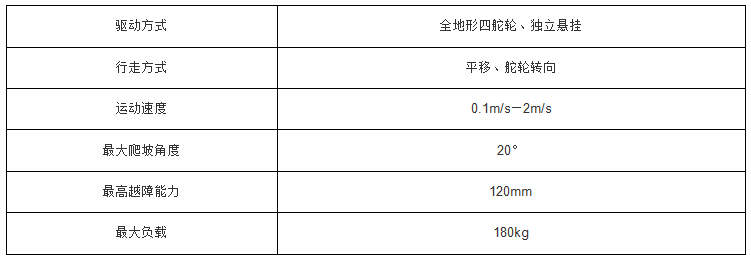
2021年8月,廣東天太機器人有限公司發布了全地形四舵輪機器人(AGV)運動結構方案。該方案集成了驅動、轉向、減震三個系統,解決了以往機器人設計生產中“要多模塊設計,多方案配合”的尷尬,為巡檢機器人等戶外用機器人設計生產提供了更優的解決方案。
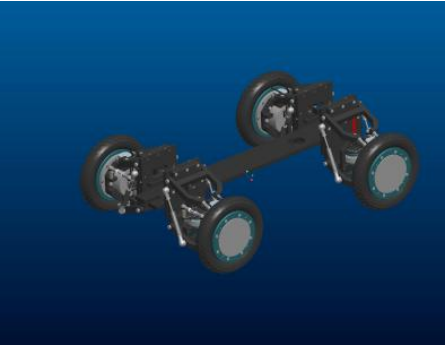
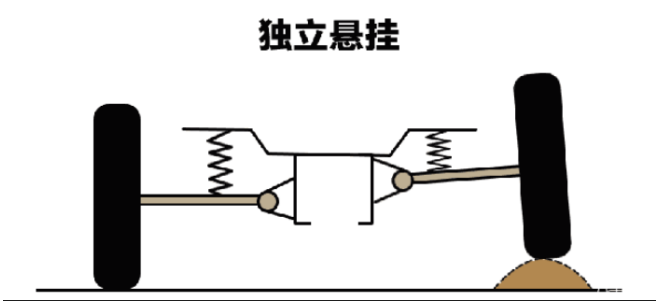
四舵輪八連桿 獨立懸掛的結構方案
方案是針對戶外機器人在運行中面對的多種場景,多地形而設計。該方案不但整體重量變小、減少了車身受到的沖擊力,并提高了車輪的地面附著力;左右車輪單獨跳動,互不相干,大幅度地減小車身的傾斜和震動,保證了行駛的平穩性,可輕松應對各種崎嶇地形。
全地形四舵輪機器人運動結構方案內含兩個減速機組成的關節總成,在保證高承載力、小體積、輕重量的同時,也提升了傳動效率,保證了傳動精度。
同時,該運動方案采用了天太完全自主知識產權的機器人運動部件——智動輪,智動輪具有高響應速度、高定位精度、體積小、功能性集成度高等特點,可實現多場景小空間的靈活運動,可高效實現自動化控制與應用。
目前來說,天太全地形四舵輪機器人運動結構方案,它結構緊湊、傳動效率高、能夠實現快捷、精準的全向運動,是解決以往機器人運動方案中的運動部件體型笨重、結構冗余、轉向不靈活,沒有減震等問題的最優方案。
讓機器人設計像搭樂高一樣簡單
天太全地形四舵輪機器人運動結構方案采取了模塊化的思路,將此前機器人全地形運動系統中的驅動輪、電機、減速機、控制器、方向機、懸掛……大大小小幾十種零部件進行集成,用組合的辦法搭建出一個全新的產品形態。最終得到了一套集四舵輪、八連桿、獨立懸掛于一體的巡檢機器人全地形運動解決方案。
其結構更緊湊、體積小巧,在應用中可以給機器人更多設計空間,能極大限度地滿足小型化、輕量化、模塊化的需求。
該方案可以讓客戶在使用過程中即插即用, 像搭樂高一樣簡單、快捷。在整個設計、生產流程中,客戶只需要考慮如何設計產品的核心功能,無需再從新考慮機器人的運動方案,從而省去了幾十種零配件選型、設計、采購、組裝的人力和時間成本。
同時這種布局的好處也顯而易見,對公司內部成本來說,產品的多樣性與標準化、模塊化并存,有利于綜合成本的降低與自身產品閉環的搭建。而在將產品導入客戶時,也將促使客戶產品模塊的標準化轉變,優化整個產業鏈條上物料、裝配、成本、供應商及售后服務管理等環節,并與工業客戶保持高度的連接,及時了解雙方生產、供應需求。
讓機器人隨處可見!
天太機器人執行總裁鄭濱表示:未來,天太機器人將繼續推出更多類似于樂高玩法的組合方案,繼續堅持低價格+低成本+低能耗的理念,在保質增效的基礎上進一步強化技術的高集成度、產品的高普及率,為工業產業發展不斷助力,讓工業應用移動機器人隨處可見的愿景得以更快速地實現。





